Heel mooi dat je de simulatie ziet, maar dat downloaden om het dan in de echte wereld op de micro:bit te zien en weer aanpassen en weer downloaden.......je snapt het al. Ik vind het wat indirect, vooral als ik lichtjes, sensoren of motortjes aansluit.
Heel even deed ik nog iets met de micro:bit in combinatie met Scratch, maar heel enthousiast werd ik er niet van.
Een tijdje geleden ontdekte ik MicroBlocks, een offline programmeeromgeving met blokken.
Gewoon de micro:bit aansluiten, programmeren en meteen op je micro:bit zien wat het resultaat is. En wil ik net als in Scratch even een blokje of een klein stukje code testen? Ik klik er op en het gebeurt meteen op mijn micro:bit.
Ik heb de interface vertaald naar het Nederlands en ben aan de slag gegaan.
Na verkenningen met de codeblokken, sensoren, motortjes en lichtjes dan nu een eerste opdracht aan mijzelf:
Maak eens iets tastbaars.
Eén van mijn testen was het aan de praat krijgen van een servo. Ik wilde met radiosignalen het motortje langzaam en sneller laten draaien.
Via een blog van Martine Segers kwam ik terecht op een blog over de pedagogische waarde van Anibots
Ik keek naar mijn bewegende servo en kreeg het beeld van een diertje dat net uit een ei is gekropen, Het wil veel bewegen en wordt na een tijdje best wel moe.
Als ondergrond knipte ik een platform van karton met inkepingen.
Met een elastiekje haalde ik dat door de gaatjes van de servo.

Het lijf plakte ik er op met een stuk dubbelgevouwen schilderstape.
Bij de eerste test was het geheel nogal wankel. Het diertje viel bij een beetje snelheid al voorover.
Onder het platform plakte ik met dubbelzijdig schilderstape eerst aan weerszijde 2 kleinere bolletjes.

Dat was al beter, maar niet voldoende. Bij 4 bolletjes bleef het diertje rechtop.

Het tape was handig om de posities van de onderdelen aan elkaar aan te passen: een beetje indrukken hier of wat draaien daar en dan zit het beter.
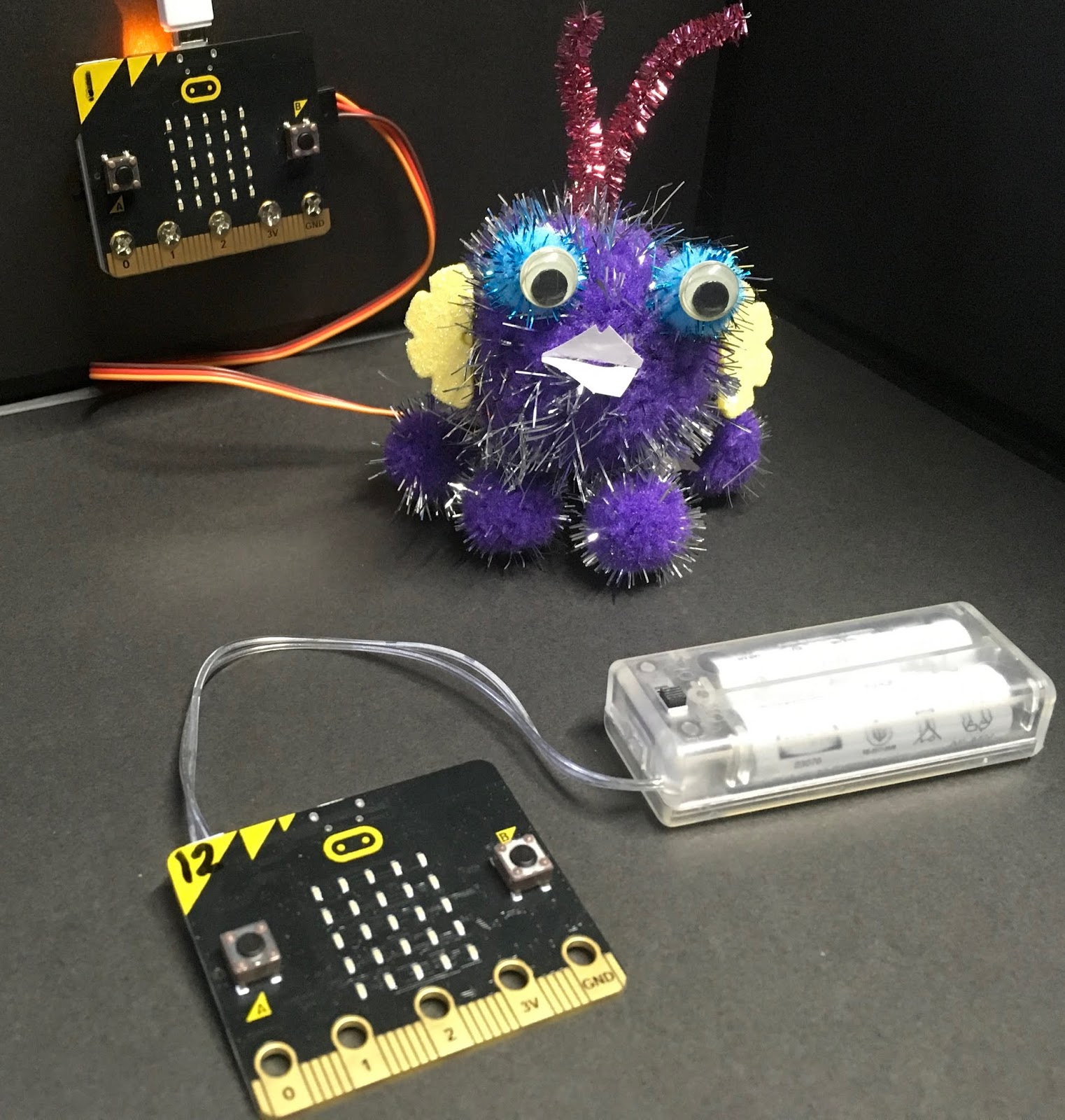

Op de ontvang micro:bit gebruik ik de variabele "swing" voor de draaihoek van de servo

Hier kun je in een filmpje zien hoe mijn diertje gaat bewegen en vervolgens gaat uitrusten.